深海信息技术研究室成立于2014年12月,主要开展深海声、光、电、磁和其它传感信息的获取、存储、传输、处理、提取、发布,及自主无人装备研发等相关技术。
研究方向:
1、深海信息流可持续观测技术
深海信息流是指海洋观测信息获取、传输、存储、计算、发布的链路过程,能够将观测结果更深层次地用于信息获取方法的修正,以提高观测精度、效率或节约能源,形成海洋观测“信息的流动”。
深海信息流需要着重开发和突破的问题为在信息链路过程中以及促使其构成循环的过程中如何能够降低成本、延长工作时间、形成持续观测、获取整合的有效信息,构建比传统海洋观测网络更加经济、智能、小型化、适应能力强的信息系统体系。
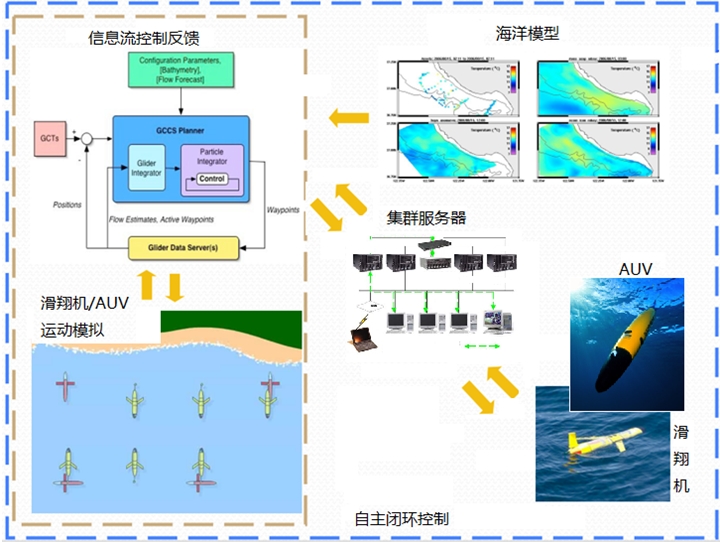
深海信息流可持续观测系统示意图(引)
2、多元化观测平台构建与深海物理海洋观测传感器技术
研究多元化观测平台构建技术。开展系列化深海物理海洋观测传感器研制,包括温度、压力、电导率、湍流以及具有感应耦合通讯功能的传感器,打破国外技术垄断,实现物理海洋传感器的国产化;开展无缆式湍流混合剖面仪研制,可搭载剪切流探头、压力探头、快速温度探头、电导率探头等多种观测传感器,填补国内在深海湍流观测领域的技术空白;开展自主技术感应耦合潜标,坐底平台等多元化的观测平台技术研究,为平台载荷传感器的功能提供了广阔的应用前景。与英国osil实验室合作(http://www.osil.com),构建了国际上首个面向深渊环境的国际深海传感器标定与校准联合实验室(international joint laboratory for deep sea sensors calibration),打造了一套具有深海工程特色的海洋仪器设备标定、计量、测试平台(如水下耐压检测等)的完整工程服务体系,建立了开发深海海洋仪器设备监测的共享平台,服务于中国科学院深海所深海物理海洋观测类传感器的标定与检测,并为其他涉海单位提供包括温度标定、压力标定、盐度标定等多元化标定检测服务。

标定实验室

多元化物理海洋观测传感器
3、深海自主无人装备及其智能控制技术
立足海洋科学研究、安全保障和水下工程作业需求,聚焦深海自主无人装备研发及其智能控制技术研究工作。以实际应用需求为牵引,通过新型装备研发和快速升级迭代,逐步打造深海自主无人装备集群,为构建实质性水下无人作业能力体系提供支撑。围绕深海考古探测作业、海底长期移动观测、复杂区域目标探查、有人/无人装备协同以及深海装备的智能运动控制、作业环境感知、自主目标识别、运行状态监测、虚拟现实测试等装备技术和理论方法开展研究,研制了深海考古专用auv、深海自主无人车、双模智能auv等系列化深海自主无人装备。

系列化深海自主无人装备
4、海洋声学感知探测技术
以海洋声学传播原理为基础,研究水声信号处理技术和水下目标特性,获取多元海洋环境参数,包括海底地貌、近底目标、水中移动目标以及海流信息等,研发多波束侧扫声呐、全海深时差式海流计和全海深多波束前视声呐等多种声学探测设备,解决6000米以深目标探测、避障、感知等难题,进一步研发通信、探测、定位、导航一体化信息处理系统,提升海洋透明度,为水下作业平台探测、避障、救援和科学研究提供国产化声学设备。

全海深时差式海流计和多波束前视声呐
5、多航态无人航行器技术研发与装备研制
开展应用于海洋观探测的新型多航态无人航行器技术研发与装备研制。面向不同应用场景,论证多款新型多航态无人海洋航行器总体设计方案,逐步建立发展以水下航行体水动力性能快速预报方法、水面航行体-波浪-水翼耦合推进性能快速预报方法、航行器参数化动力学系统建模及多目标优化方法等为核心的总体设计方法。突破矢量推进、波浪推进、耐压水密型柔性太阳能板阵列、水面-水下高速推进、水面-水下模态快速转换、水下滑翔等关键技术,构建并迭代发展多航态航行器电控平台以及载体结构,实现此类航行器的谱系化发展。

海洋观探测新型装备集群
6、海洋大数据融合技术
深海信息伴随着大数据的迸发式呈现,这些数据来源于不同的机理,以不同的形式、不同的可信度、不同的时空尺度出现。海洋大数据融合技术就是挖掘数据之间内在的联系,将这些数据转换为有效的信息,研究大数据的云存储、并行计算方法,加快数据发布时效性,整合学科之间的信息资源,形成关联可扩展的数据更新机制,发展信息融合发布技术,以全息的形式揭示复杂海洋动力现象、水下目标场景、海洋生物生态环境,支撑所内其它学科的发展。
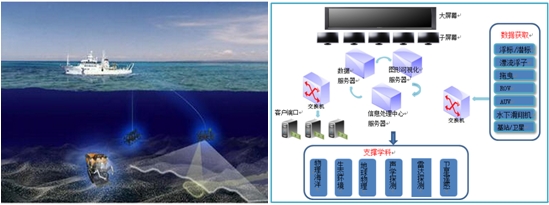
深海信息可视化观测及大数据处理示意图
研究团队:

郭威,研究员,博士研究生导师。
中国科学院深海科学与工程研究所深海信息技术研究室主任。中国科学院深海科学与工程研究所学术委员会委员,深海工程技术部副主任。主持或参与国家重点研发计划、国家自然科学基金及省部级项目20多项,发表论文50多篇,授权专利40多项,出版专著一部。2012年获得人力资源和社会保障部/海洋局先进个人,2014年获中国科学院杰出科技成就奖,个人获得中国科学院杰出科技成就奖突出贡献者称号,2019年获海南省领军人才称号,2013年获海洋工程科学技术奖一等奖,2015年获中国造船工程学会科学技术奖特等奖。
邮箱:guow@idsse.ac.cn

田川,博士,研究员,博士研究生导师。
中国科学院深海科学与工程研究所学术委员会副主任委员,深海工程技术部主任。先后完成国家重点研发计划、自然基金青年基金、中国科学院战略先导专项等项目十余项。
邮箱:tianc@idsse.ac.cn

徐文,博士,教授,博士研究生导师。
中国科学院深海科学与工程研究所学位评定委员会主席,深海信息技术研究室首席专家。曾任中国科学院声学所助理研究员,研究室副主任。美国麻省理工学院海洋工程系研究科学家。美国德立台 rd 仪器公司(teledyne rd instruments)研究科学家、高级研究科学家、项目经理。曾任浙江大学海洋研究院常务副院长,浙江大学信号空间和信息系统研究所所长。多项国家863计划重大项目总体专家组成员,2002年美国声学学会会员,2004年国际电子电气工程师学会(ieee)高级会员。
邮箱:wxu@idsse.ac.cn

沈斌坚,研究员,博士研究生导师。
曾任中国船舶重工集团公司第七一五研究所副主任,获得“声学多普勒海流剖面仪的宽带信号处理方法”、“用于声学多普勒海流剖面仪的相控换能器阵和相控方法”、“相控阵三维声学摄像声纳的阵处理方法”等发明专利授权。1999-2006年担任“h/sqg-206a型拖曳线列阵声纳”副总设计师,获中船重工集团科技进步一等奖。1998-2017年担任“相控阵声学海流剖面仪”总负责人,获中船重工集团科技进步二等奖;“深海内波声学实时探测系统”获中船重工集团科技进步一等奖。“相控阵三维摄像声纳实时信号处理和图像构建关键技术” 获浙江省科技进步一等奖。 曾任中国科学院深海科学与工程研究所深海工程技术部主任和深海信息技术研究室主任。

陈宇翔,博士,高级工程师,博士研究生导师。
本硕博就读于哈尔滨工程大学。主要从事新型海洋观探测装备技术研发与总体设计,系统动力学与控制、水动力分析研究。
邮箱:chenyux@idsse.ac.cn

刘本,博士,副研究员,博士研究生导师。
加拿大麦克马斯特大学电子工程博士。主要从事目标定位跟踪、状态估计、多源信息融合和被动声学监测技术研究等。
邮箱:liub@idsse.ac.cn

郭新新,博士,高级工程师,硕士研究生导师。
西北工业大学电子信息工程专业学士,法国里昂国立应用科学学院,电子学、电子技术及自动化专业硕士、博士。主要从事深海目标探测、海流感知、海底地貌测绘等声学信号处理技术研究及深海声学设备研发工作。
邮箱:guoxinxin@idsse.ac.cn

刘立昕,博士,副研究员,硕士研究生导师。
本、硕、博毕业于哈尔滨工程大学水声工程学院信号与信息处理专业。主要从事海洋数据传输、信息融合与处理、数字图像处理等研究工作。
邮箱:liulx@idsse.ac.cn

徐高飞,博士,高级工程师,硕士研究生导师。
吉林大学自动化专业学士,中国科学院大学(沈阳自动化研究所)模式识别与智能系统专业博士。主要从事深海自主无人装备及其智能控制技术研究工作,研究方向包括自主水下机器人、新概念水下机器人、深海载人潜水器等装备的总体设计、工程研发与智能控制。
邮箱:xugf@idsse.ac.cn

徐霄阳,博士,工程师。
中国海洋大学计算机系统结构专业博士。主要从事海洋传感器技术、感应耦合通信技术研究以及海洋多元化观测平台研制工作。

张胜宗,硕士,工程师。
哈尔滨工程大学控制科学与工程专业硕士。主要从事海洋物理传感器结构设计、多元化平台集成观测等研究工作。

王晨,硕士,工程师。
厦门大学电子与通信工程专业硕士。主要从事水声通信、感应耦合通信、卫星通信等水下与水面通信技术的研究,以及观测平台系统集成研制。

吕成财,硕士,工程师。
哈尔滨工程大学导航制导与控制专业硕士。主要从事水下智能导航制导控制理论研究、模拟电路前端设计工作。

于亮,硕士,工程师。
马来西亚博特拉大学机械工程专业硕士。主要从事水下设备研发,负责传感器结构设计方面的工作。

孙宇,硕士,工程师。
西南交通大学机械电子工程专业硕士。主要从事深海智能探测装备结构设计工作。

兰彦军,硕士,工程师。
哈尔滨工业大学电气工程专业硕士。主要从事深海装备电控系统设计与实现工作。

符一凡,硕士,工程师。
同济大学电气工程专业硕士。主要从事水下装备的嵌入式系统软件开发与调试、设备集成等工作。

于春亮,硕士,工程师。
本硕就读于哈尔滨工业大学。主要从事控制算法与嵌入式电控软件设计开发。

朱弘,硕士,工程师。
本硕就读于哈尔滨工业大学。主要从事机械设计。

熊宏,硕士,工程师。
本硕就读于上海交通大学。主要从事动力学与控制、水动力仿真。

张磊,硕士,研究室助理。
河南工业大学粮油食品学院硕士。主要从事研究室及项目的支持工作。
k8凯发推荐 copyright?中国科学院深海科学与工程研究所 备案证号:
地址: 三亚市鹿回头路28号 邮编:572000 网站维护:深海所办公室 邮箱: